操縦システム
ロボットは人の手で点検口から投入し、オペレータが遠隔で操縦をおこなう。オペレータはロボットに搭載されたカメラの映像を見ながらロボットを操縦し、従来点検口から目視で確認出来なかった死角や遠方箇所の調査をおこなう。ロボットが撮影した映像やセンサ情報を記録することで、水漏れや経年劣化の調査、ケーブルの断線や耐震性評価などといった様々な調査に活用できる。
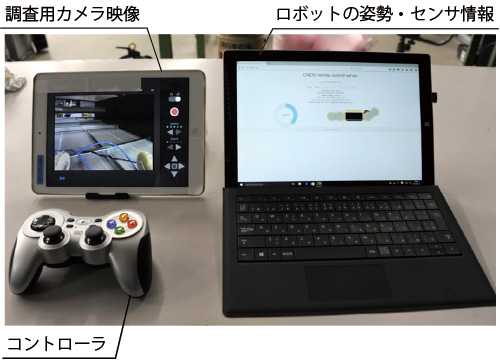
- PCにロボットの姿勢とセンサ情報が表示される
- ロボットはコントローラで操作
- 調査用カメラの映像はタブレットに表示
ロボットは人の手で点検口から投入し、オペレータが遠隔で操縦をおこなう。オペレータはロボットに搭載されたカメラの映像を見ながらロボットを操縦し、従来点検口から目視で確認出来なかった死角や遠方箇所の調査をおこなう。ロボットが撮影した映像やセンサ情報を記録することで、水漏れや経年劣化の調査、ケーブルの断線や耐震性評価などといった様々な調査に活用できる。
copyright © 2007 fuRo. All rights reserved.