スペック
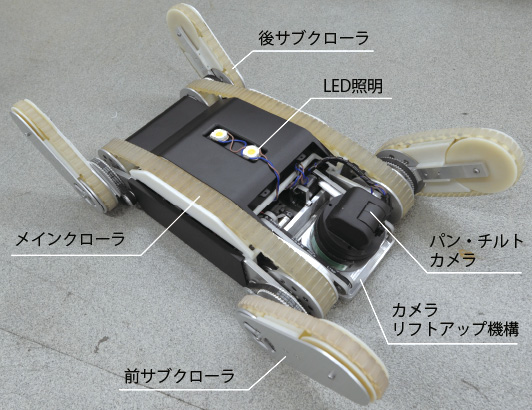
各部の機能
テレオペレーションで操縦するロボットは、高い位置から自身を俯瞰視するカメラを搭載する事で自身と周囲の環境の位置関係が把握し易くなり操作性が高くなるが、天井裏の空間は非常に狭く、かつダクトや電線などが多く、高い位置俯瞰カメラを設置すると環境に干渉したり絡まったりしてしまうリスクが考えられる。そこでカメラスイング機構を搭載し, カメラの高さを変えられる構造とした。これにより,狭隘部でケーブルなどに絡まるリスクの軽減と操作性の向上を図った。
仕様
| 外形寸法 | 全長350[mm] 幅250[mm] 高さ90[mm] |
|---|---|
| 重量 | 4.5[kg] |
| 駆動方式 | 6クローラ式 |
| 原動機 | DCモータ |
| 移動速度 | 1.2[m/s] |
| 電源 | 68[Wh] リチウムイオンバッテリ |
| 移動時間 | 2時間以上 |
| 通信方式 | 無線LAN |