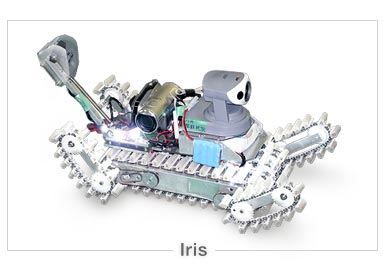
2008年より実用予定の試作ロボット:Iris
一般企業と共同研究開発した試作ロボット。遠隔操作により一般戸建て家庭の床下を点検するロボットとして実用に向け、安全設計にも考慮。
機能紹介
- 障害物上での移動
床下の土間や配管を乗り越えて走行が可能。 - 走破能力
床下の基礎部分に作られた幅500mm、高さ300mmの貫通口を通り抜けることが可能。 - 家主への報告
サビ、水漏れ、シロアリなどの点検状況の記録として、遠隔操作で静止画像を撮影し、家主へ報告書として提供。 - モニタリング
Irisの位置と姿勢を画面上でモニタリングし、容易な作業を実現。
開発背景
応募し採択された、『平成18年度サービスロボット市場創出支援事業』の一環として、国立大学法人筑波大学と共同開発。
従来行われていた床下の水漏れやシロアリ被害等を確認・補修するための点検では、狭い空間に入って土埃の中で作業するため、点検員の身体・精神的負担は大きく、危険も多くあった。また昨今、悪徳点検商法などの事件により、お客様が直接見ることができない部位について、正しく状況報告することも強く求められている背景を受け、点検ロボットの開発着手に至った。