Hibiscus:機能紹介
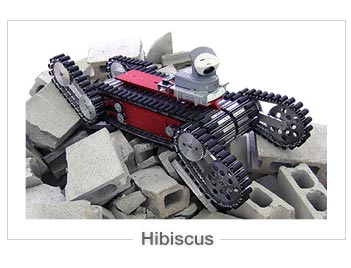
- 障害物上での移動
センタークローラーが機体全体を覆うように構成されているため、障害物に乗り上げても空転することなく移動。 - 安定した姿勢での走行
左右それぞれが独立して制御できる6本(前部、センター部、後部各2本ずつ)のクローラーにより構成、前後左右のクローラーはアームとして機能します。前部先端の直径を大きくすることにより、瓦礫の隙間にアームが突き刺さることなく安定した姿勢で走行。 - 被救助者の発見
赤外線熱感知センサやサーモグラフィを搭載し、被救助者の発見が容易に。 - 廉価な開発費
入手に困難な部品を避けることにより、実用化を見据えた1体500万円程度を実現。
開発コンセプト
従来のロボットでは走行が困難な瓦礫上をはじめ、複雑な地形、多様な被災現場においても行きたい方向や速度を1本のジョイスティックにて操作できる半自律走行制御を確立したヒューマンインタフェースを開発する。2007年中の実用化を目指し、全国の消防署・救助部隊での利用が期待される。