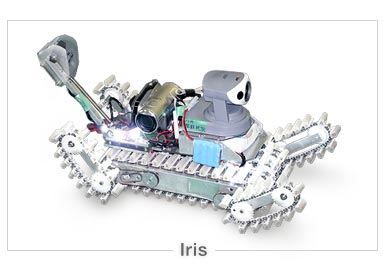
Iris
May 2006
Joint development project with the University of Tsukuba as a selected applicant for the 2006 Service Robot Market Creation Assistance Project. Conventional underfloor inspections to examine and repair damage from water seepage, termites and the like have entailed considerable danger and physical and mental stress on the part of the inspectors due to dusty work environments in narrow spaces. With recent infringements of statutes governing fraudulent inspection, the development of inspection robots has been further informed by the strong demand for accurate status reports of sections not directly visible to end customers.
Specifications
| size | 400-500 X 280 X 250(mm) |
|---|---|
| weight | 6(kg) |
| maximum running speed | 30(cm/sec) |
| operating time | 1h |